


★★★★★ ★★★★★ ★★★★★
TAMIYA ITEM No.71202 プログラミング工作シリーズ No.2
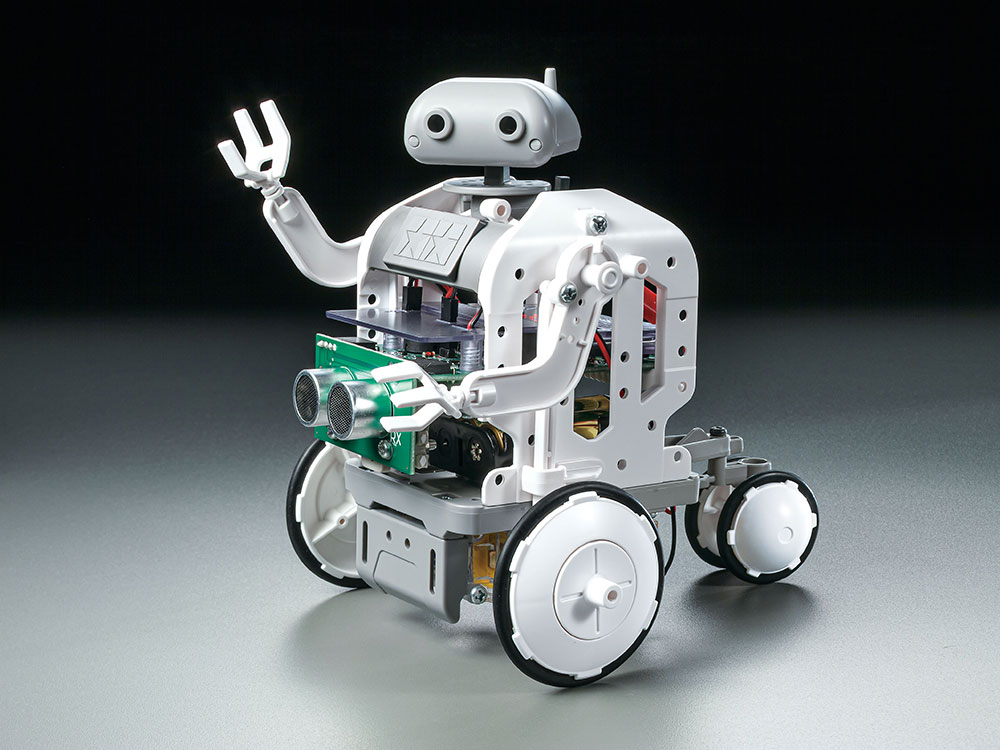
マイコンロボット工作セット (ホイールタイプ)

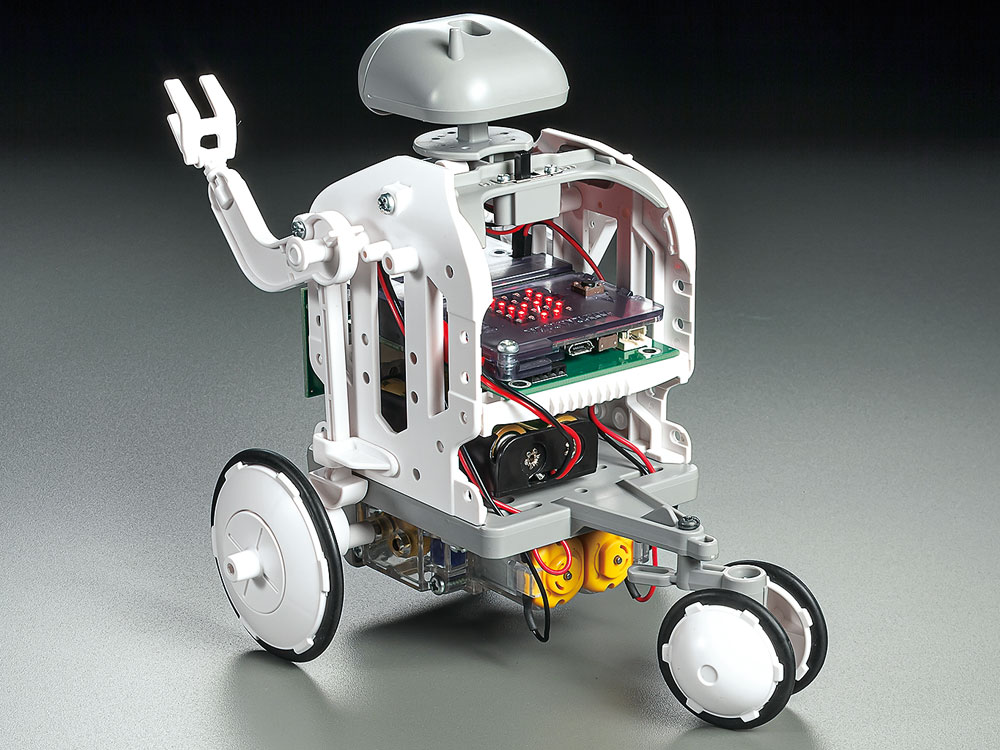
【 ホイール走行が楽しい!マイコンロボット第2弾 】
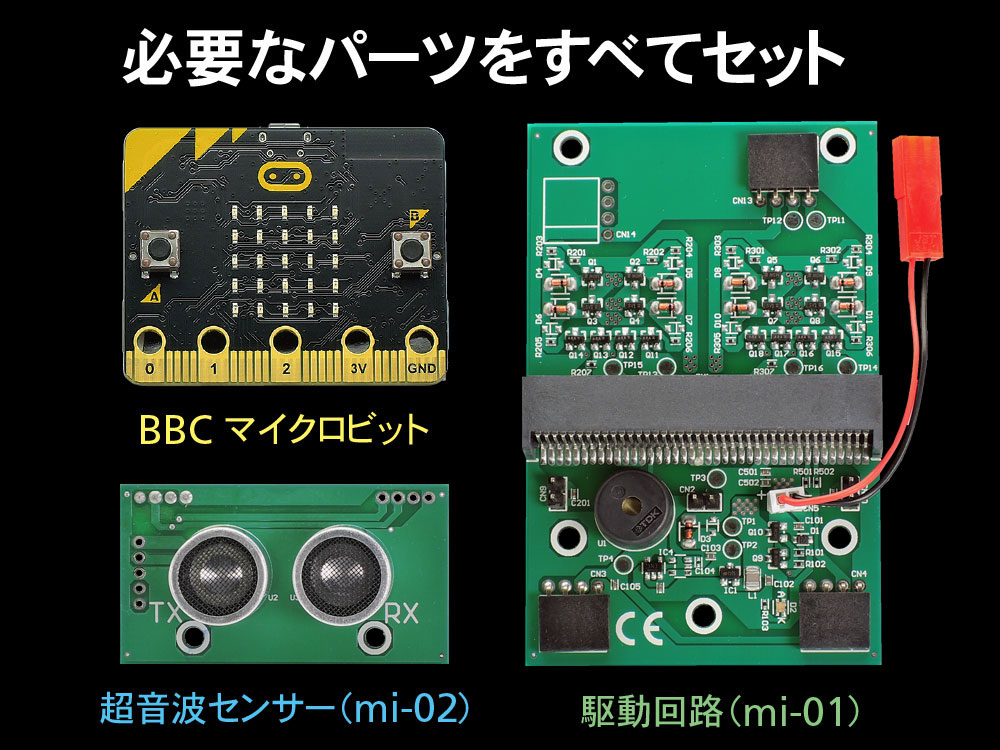
教育用マイコンボード「BBCマイクロビット」(BBC micro:bit)に加えて、超音波センサーとモーター駆動回路を搭載した、ホイール走行のロボット工作セットです。
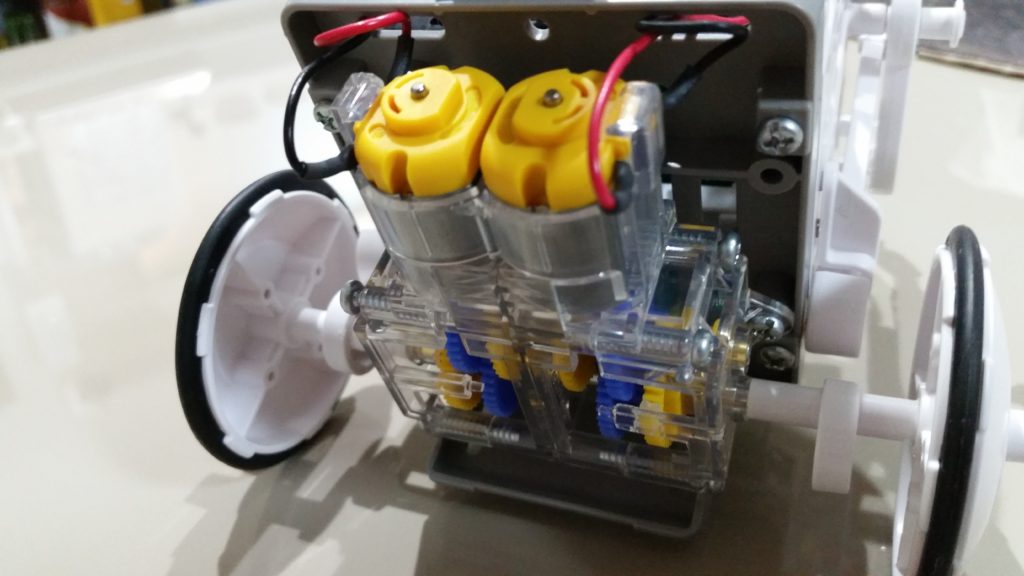
インストールされた基本プログラミングをもとに、ダブルギヤボックス内の2つのモーターをコントロール。障害物をよけて自動走行します。
また、大径のフロントホイールと小径のリヤホイールによる軽快な動きもポイント。左右のアームと頭部は走行に連動してスイングするので、元気に歩きながらあたりを見回すような、かわいらしさいっぱいのアクションが楽しめます。
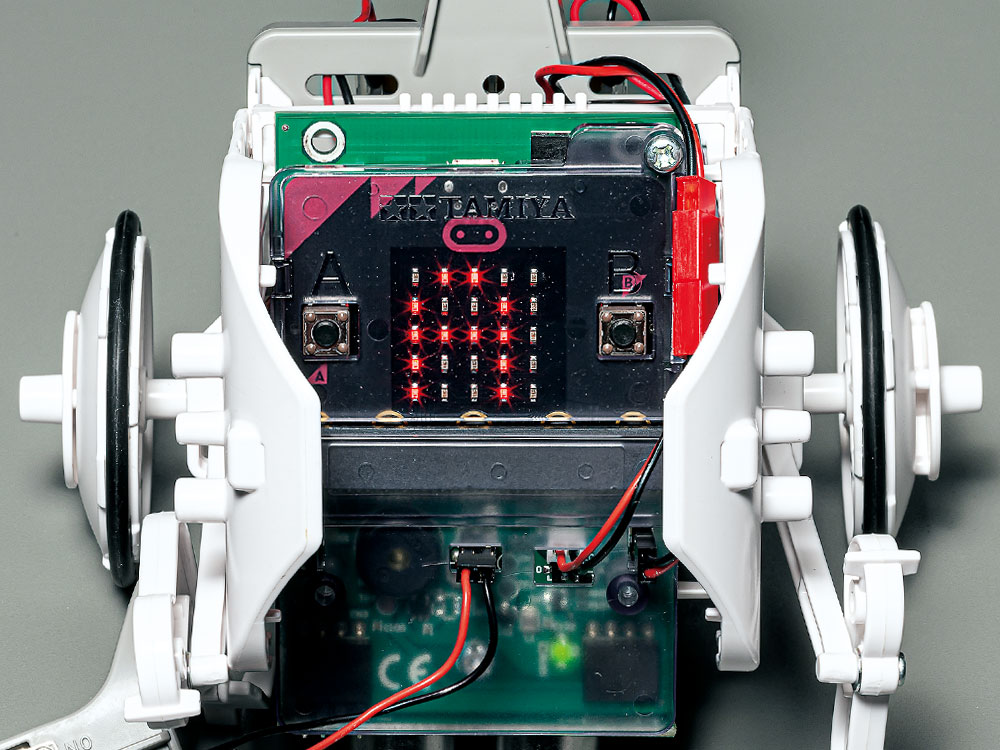
また、胴体部分からよく見えるBBC マイクロビットのLED、ロボットのデザイン、グレイとホワイトのカラーリングがかもし出すSFムードも魅力たっぷり。
必要な部品は全てセットされ、各部の配線は差し込み式。世界的に注目されているSTEMを手軽に組み立てて体験できる工作セットです。
※BBC micro:bitは、micro:bit教育財団の登録商標です。
【 STEM教育とは 】
STEMとは、Science(科学)、Technology(技術)、Engineering(工学)、Mathematics(数学)の頭文字を取ったもので、これら4つの学問の教育に力を注いで、IT社会とグローバル社会に適合した国際競争力を持った人材を多く育てていこうという考えをベースにした、21世紀型の教育システムです。
日本で2020年度から始まる「小学校でのプログラミング教育の必修化」もその一環といえるでしょう。
★★★★★ ★★★★★ ★★★★★
■ マイコンロボット(ホイールタイプ) プログラム集
(注意)これらのファイルはバイナリー形式のファイルなので、ファイルを開いてみても「0」と「1」の数字の羅列なので何も分かりません。
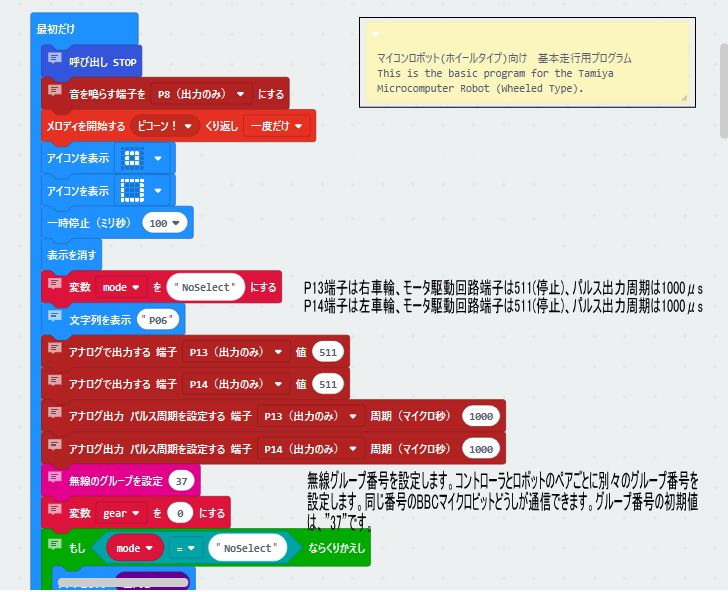
★ No.06 「基本走行プログラム」ファイル名
06_DrivingProgram_WHEEL_v1.hex
★ No.02 「コントローラ用プログラム」(基本)ファイル名
02_ControllerProgram_v1.hex
★ No.03 「シンプルな走行用プログラム」(応用/サンプルプログラム)ファイル名
03_RunningProgram_v1.hex
★ No.04 「シンプルな超音波センサー用プログラム」(応用/サンプルプログラム)ファイル名
04_UltrasonicProgram_v1.hex
★ No.05 「シンプルな無線操縦用プログラム」(応用/サンプルプログラム)ファイル名
05_RadioControlProgram_v1.hex
★★★★★ ★★★★★ ★★★★★
■ プログラムを MakeCode for micro:bit ソフトウェアで検証
ビジュアルプログラミング言語 「Scratch(スクラッチ)」形式で表示することができます。
①.MakeCode for micro:bit ソフトを立ち上げる。
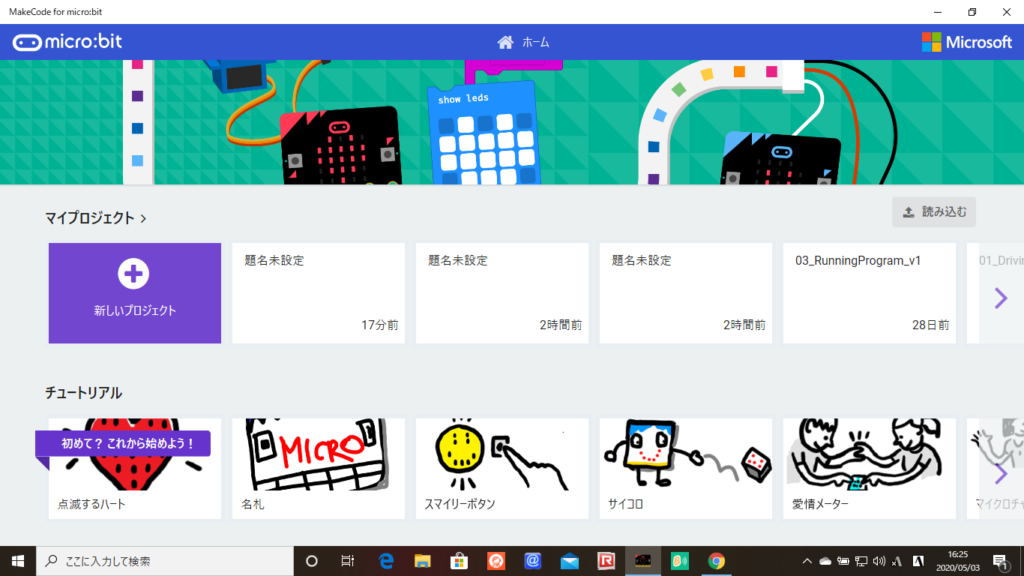
②.「読み込む」をクリックする。

③.さらに、「ファイルを読み込む」をクリックする。
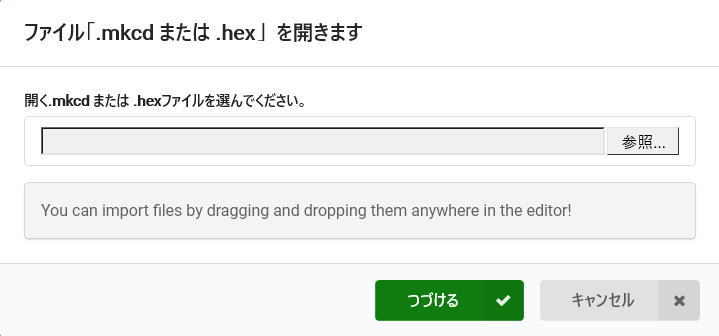
④.「参照」をクリックして、自分のパソコンに格納しているHEXファイルを選択する。(例)04_UltrasonicProgram_v1.hex
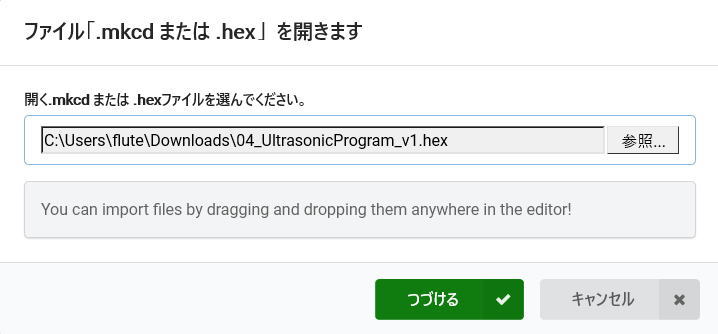
⑤.「つづける」をクリックする。
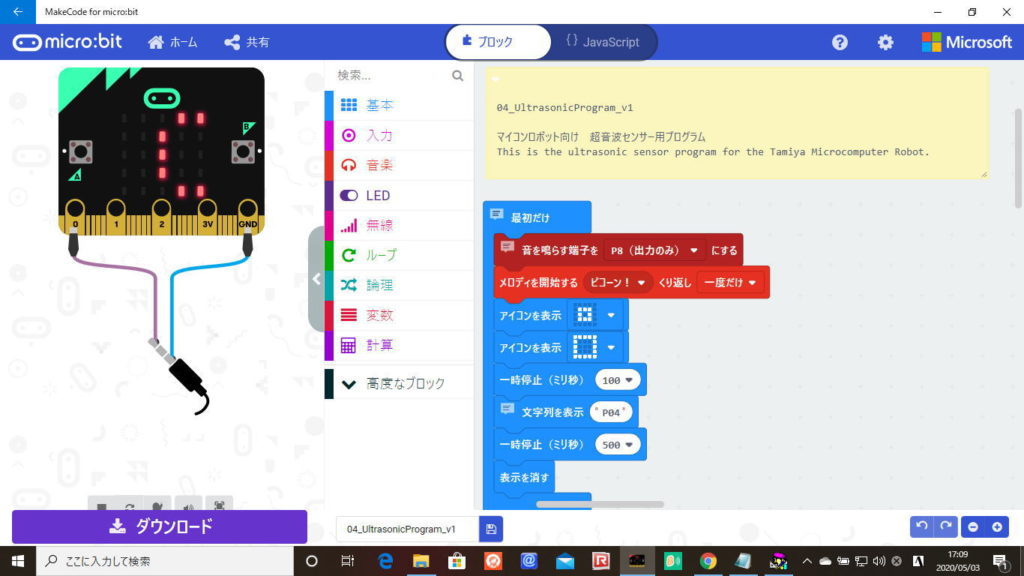
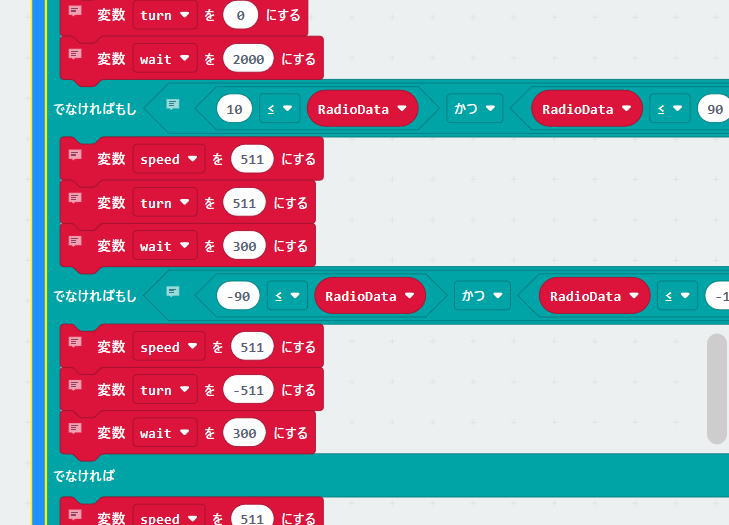
⑥.04_UltrasonicProgram_v1.hex ファイルが、ビジュアルプログラミング言語 「Scratch(スクラッチ)」形式で表示される。
★★★★★ ★★★★★ ★★★★★
■ マイコンロボット(ホイールタイプ) プログラム集
★ No.06 「基本走行プログラム」ファイル名
製品にインストールされているプログラム。初期状態に戻す場合などに使用します。
https://www.tamiya.com/cms/img/usr/item/7/71202/06_DrivingProgram_WHEEL_v1.hex
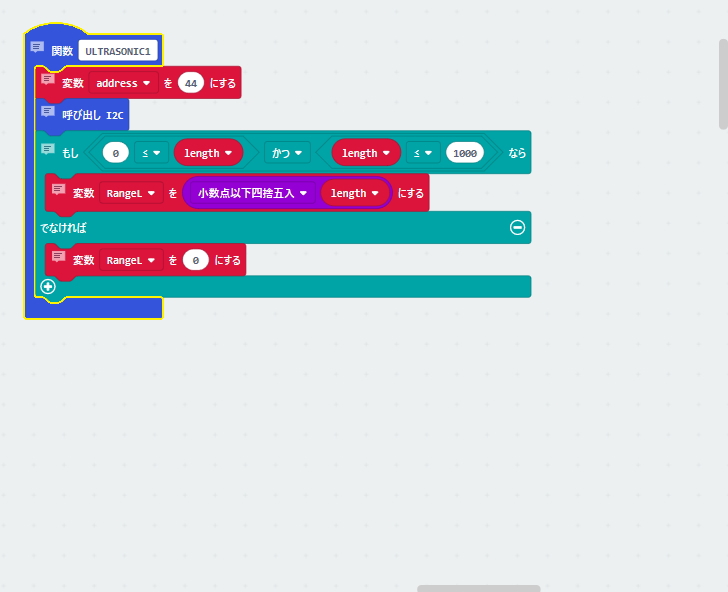
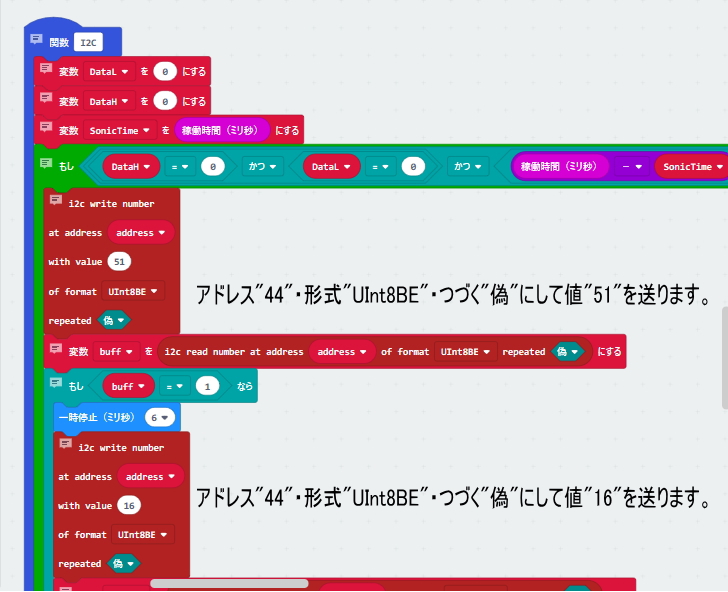
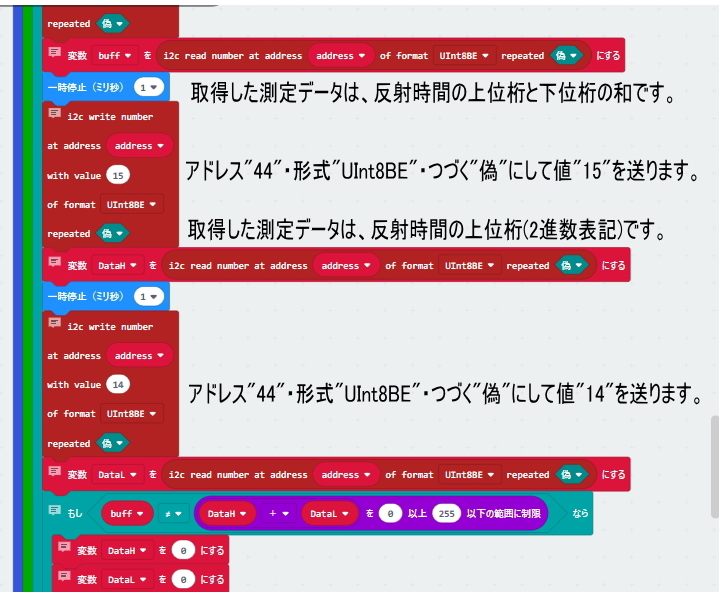
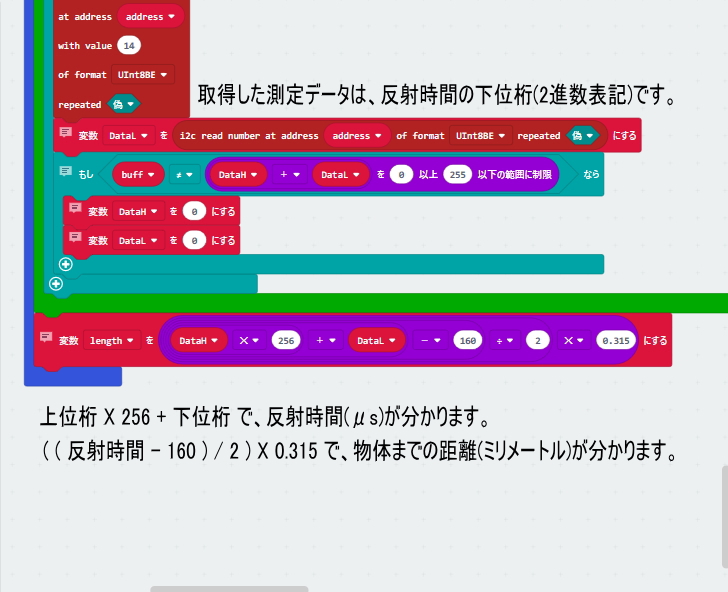
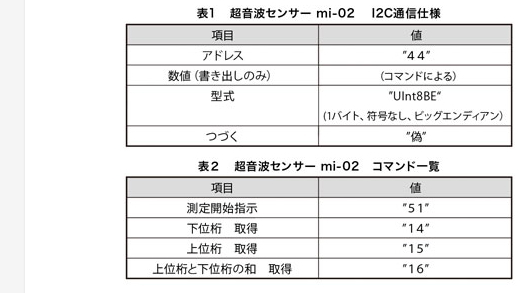
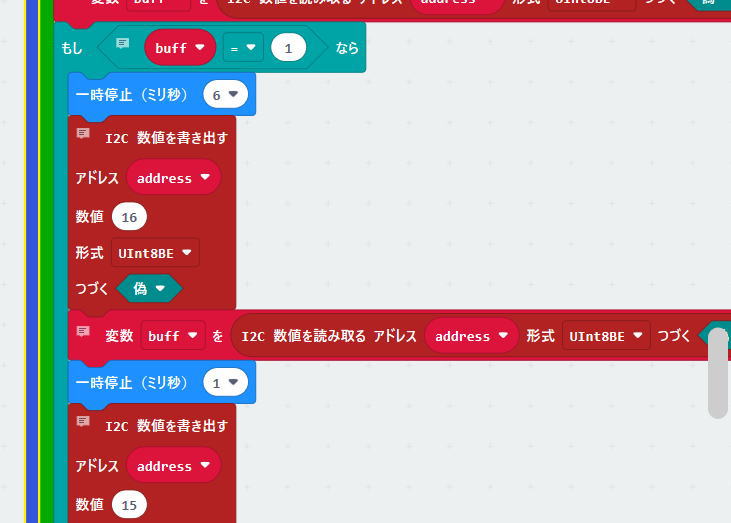
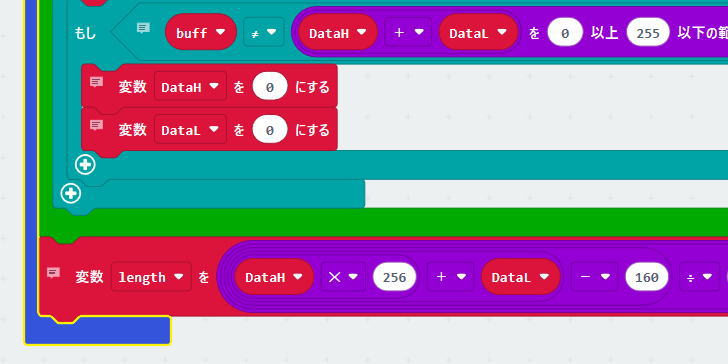
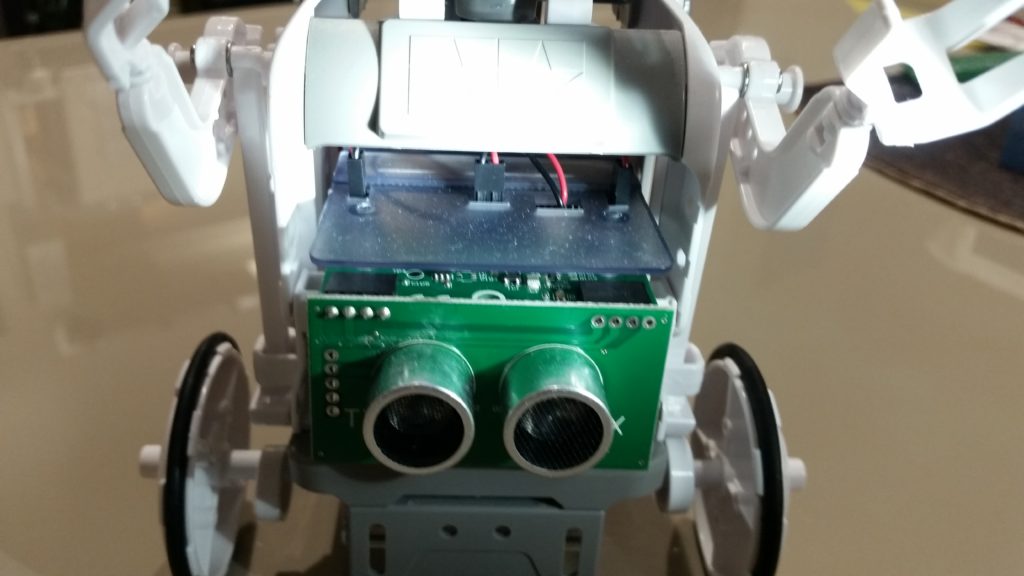
超音波センサを使うには、BBCマイクロビットと超音波センサmi-02(アドレス:44)との間で数値の送受信(I2C通信)を行う必要があります。センサから超音波を出し、超音波が物体に反射して戻ってくるまでの時間を測定し、センサは2つの数値に分割して送り返してきます。送り返されたデータから物体までの距離を計算することが出来ます。
★★★★★ ★★★★★ ★★★★★
★ No.02 「コントローラ用プログラム」(基本)ファイル名
初期状態に戻す場合などに使用します。
https://www.tamiya.com/cms/img/usr/item/7/71201/02_ControllerProgram_v1.hex



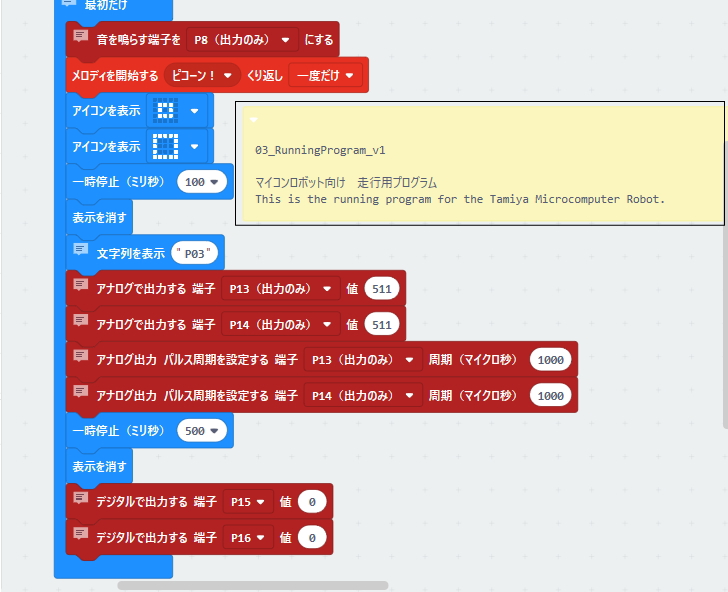
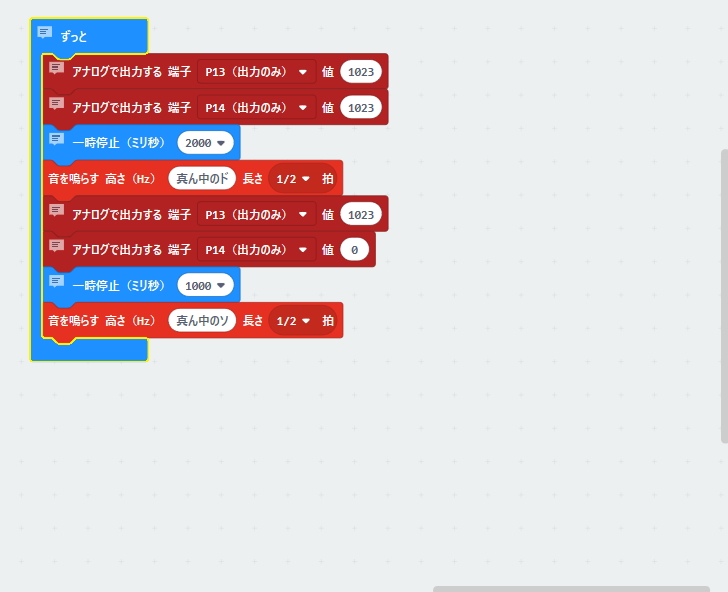
★ No.03 「シンプルな走行用プログラム」(応用/サンプルプログラム)ファイル名
オリジナルプログラムのベースとして活用できます。2秒前進と1秒左旋回を繰り返します。
https://www.tamiya.com/cms/img/usr/item/7/71201/03_RunningProgram_v1.hex
★ No.04 「シンプルな超音波センサー用プログラム」(応用/サンプルプログラム)ファイル名
オリジナルプログラムのベースとして活用できます。障害物までの距離(20~500mm)に比例して鳴らす音の高さを変えます。
https://www.tamiya.com/cms/img/usr/item/7/71201/04_UltrasonicProgram_v1.hex





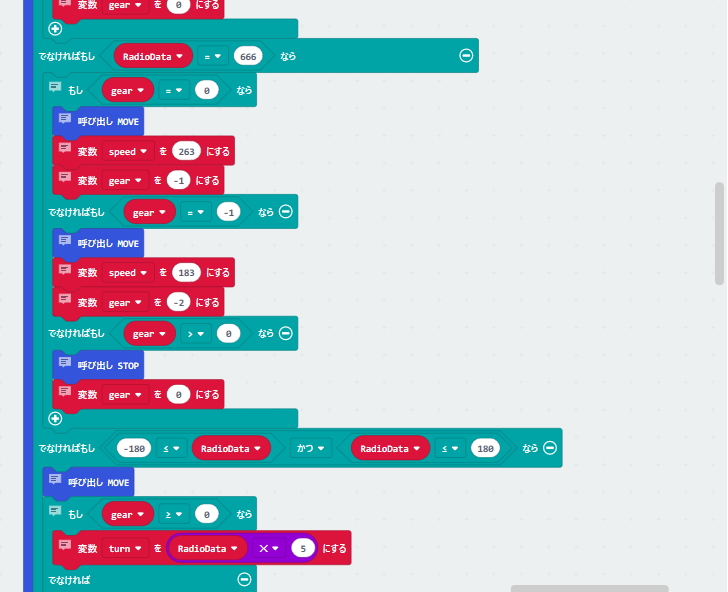
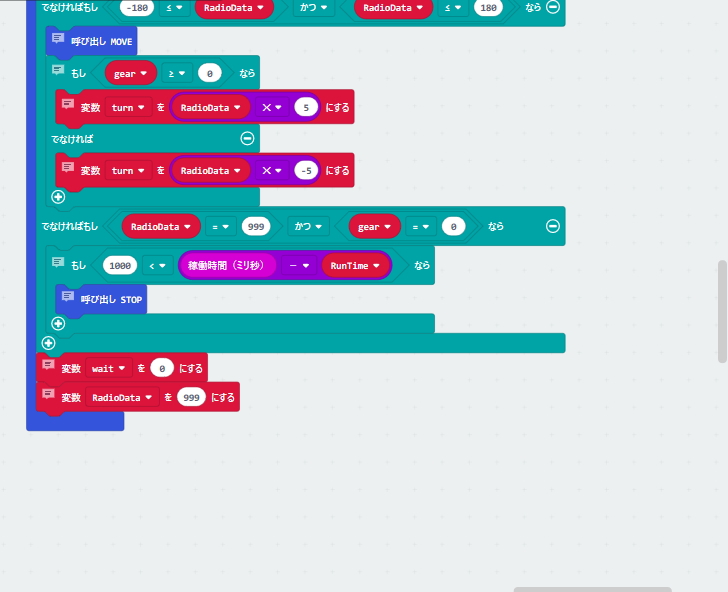
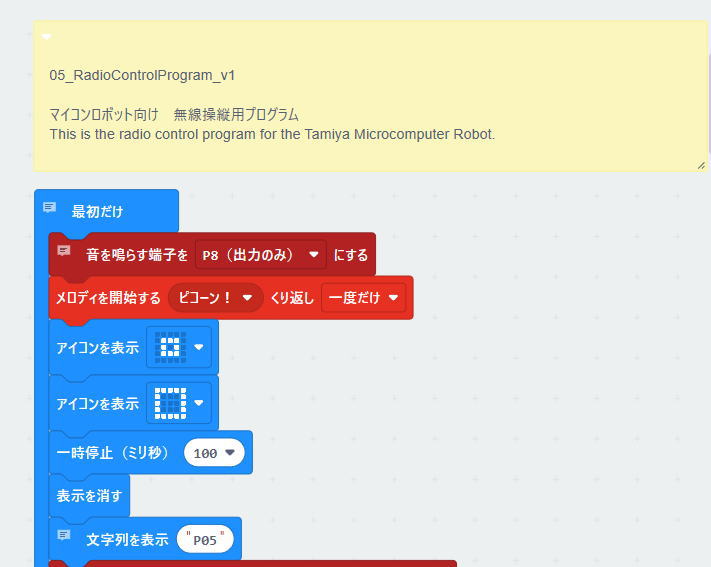
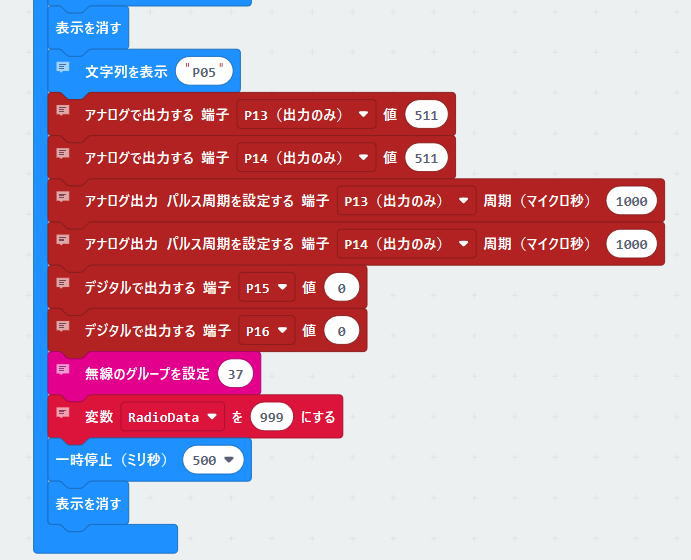
★ No.05 「シンプルな無線操縦用プログラム」(応用/サンプルプログラム)ファイル名
オリジナルプログラムのベースとして活用できます。
コントローラーのAボタン→2秒前進
コントローラーのBボタン→2秒後退
コントローラーの傾き→傾けた方向に1秒旋回
https://www.tamiya.com/cms/img/usr/item/7/71201/05_RadioControlProgram_v1.hex


★★★★★ ★★★★★ ★★★★★
■ マイコンロボット(ホイールタイプ) プログラムについて
★ プログラム詳細については、こちらを参照してください。
https://www.tamiya.com/japan/robocon/topics/programming191113.html
★ プログラムQ&Aについては、こちらを参照してください。
https://www.tamiya.com/japan/robocon/topics/faq190711.html
★★★★★ ★★★★★ ★★★★★
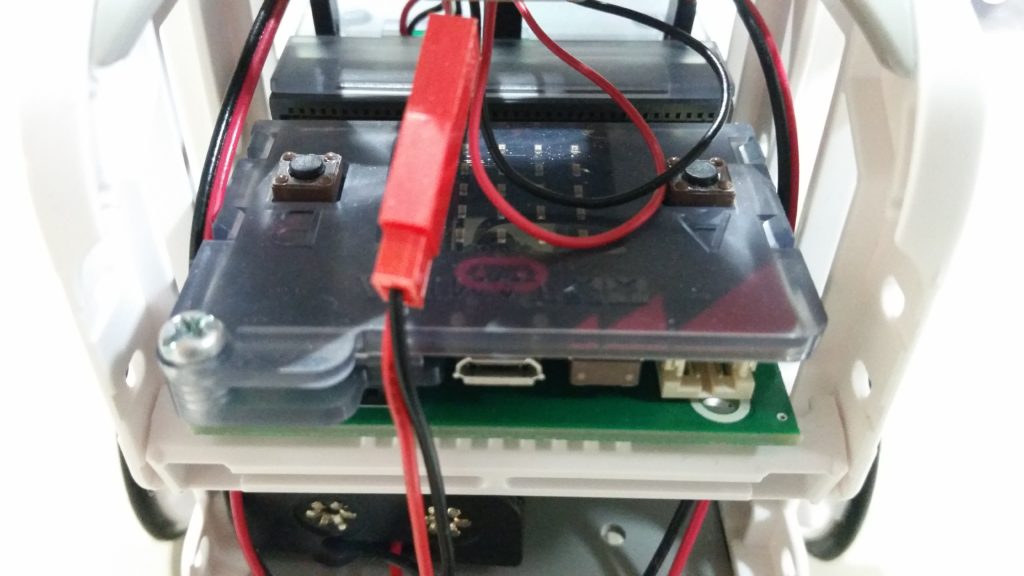
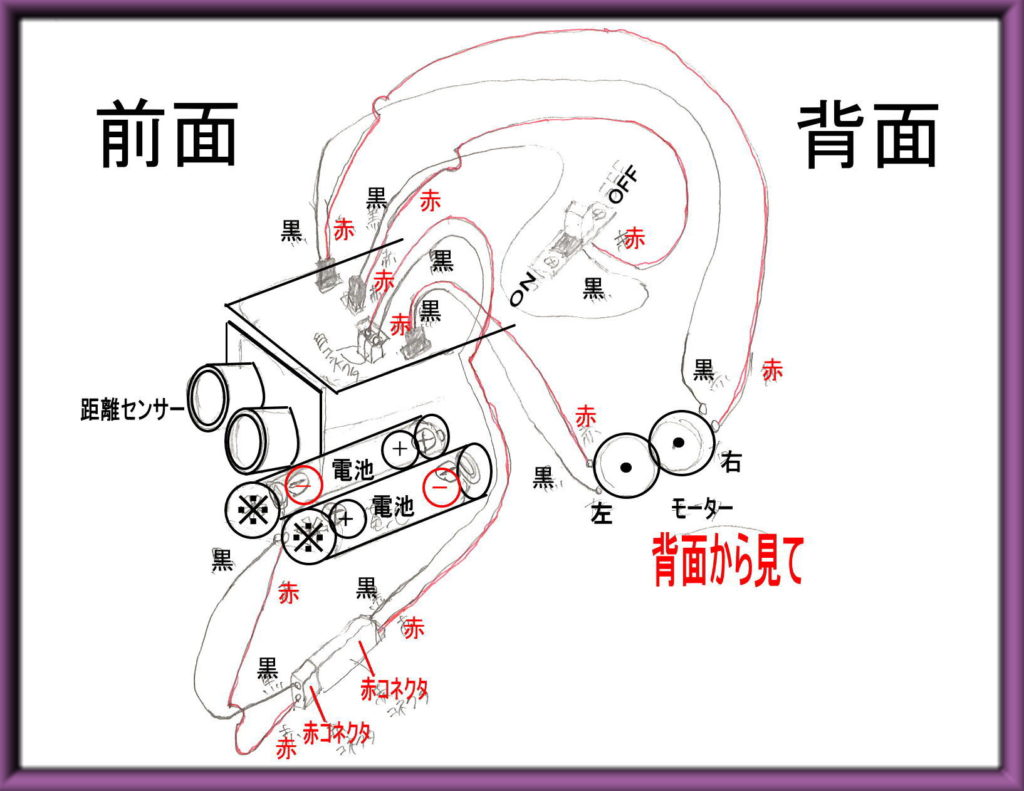
■ マイコンロボット(ホイールタイプ) 電気配線系統図
自分でロボットを組み立てて見ましたが、最後の電気配線で大変苦労したので、ここにメモ書きとして残しておくことにしました。
★★★★★ ★★★★★ ★★★★★
マイコンロボット(ホイールタイプ) 電気配線系統図
★★★★★ ★★★★★ ★★★★★